最近研究深度强化学习算法,进而对控制理论感兴趣,发现了PID这个广泛使用的控制算法。大概了解记录一下。PID控制器(比例-积分-微分控制器),由比例单元(P)、积分单元(I)和微分单元(D)组成。透过Kp,Ki和Kd三个参数的设定。PID控制器主要适用于基本上线性,且动态特性不随时间变化的系统。
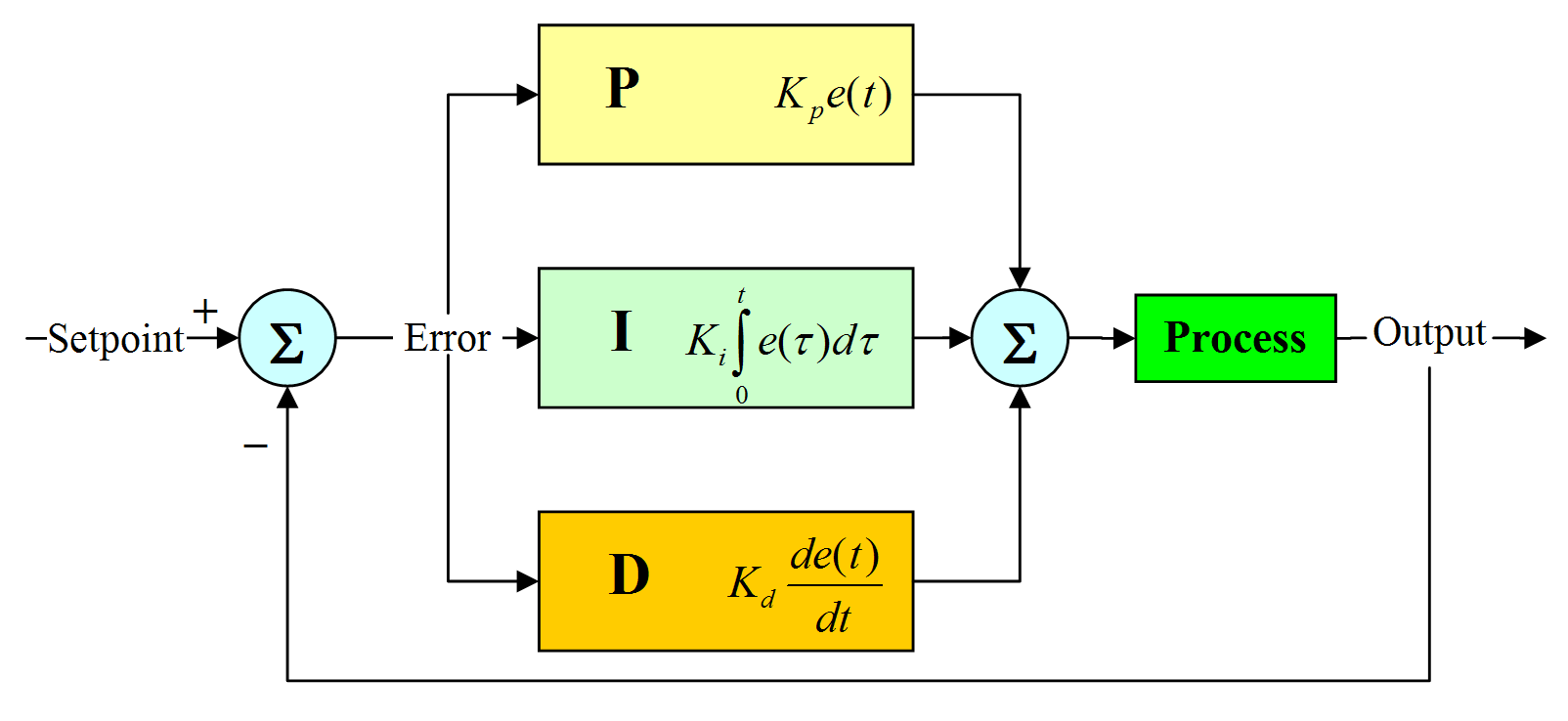
PID是以它的三种纠正算法而命名。受控变数是三种算法(比例、积分、微分)相加后的结果,即为其输出,其输入为误差值(设定值减去测量值后的结果)或是由误差值衍生的信号。若定义 $u(t)$为控制输出,PID算法可以用下式表示:
$$ {u}(t)= {MV}(t)=K_{p}e(t)+K_i\int _{0}^{t}{e(\tau )}{d\tau }+K_d{\frac{d}{dt}}e(t)$$
其中:
$K_{p}$:比例增益,是调适参数
$K_{i}$:积分增益,也是调适参数
$K_{d}$:微分增益,也是调适参数
$e$:误差=设定值(SP)- 回授值(PV)
$t$:目前时间
$\tau$ :积分变数,数值从0到目前时间 $t$
参考链接
- PID控制器,by wikipedia.
- PID控制算法原理(抛弃公式,从本质上真正理解PID控制),by 确定有穷自动机.